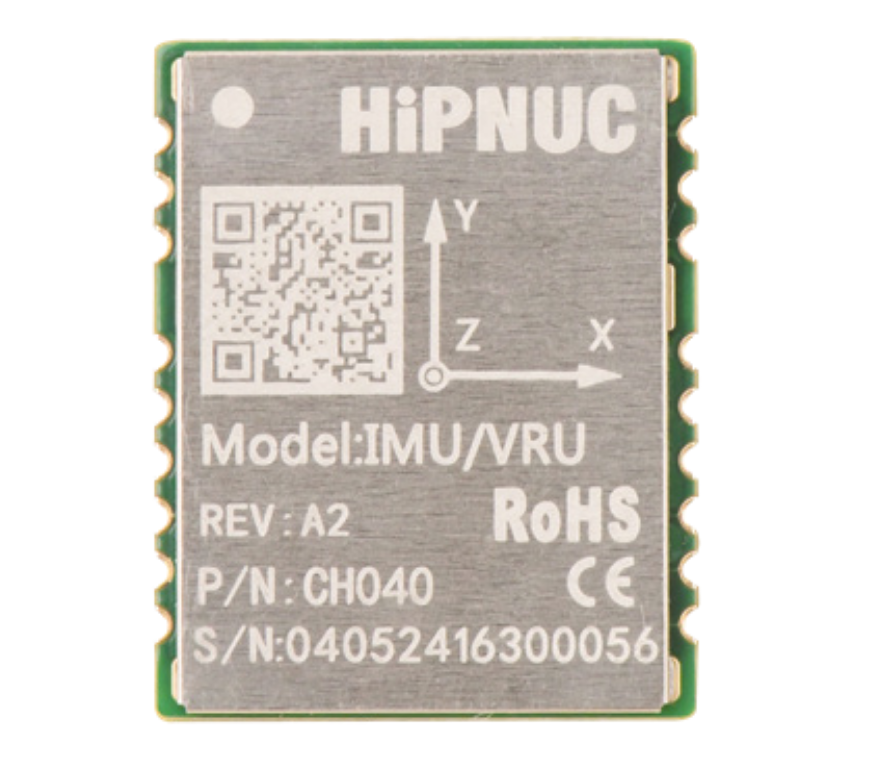
CH040
CH040 series
CH040 9-axis Embedded Attitude Sensor
SMD 9-axis module; 35.3 x 25.7 x 4.6 mm; 3.3V to 5V; UART / Micro-USB; 500 Hz; optional barometer variant.
- Interface
- UART; Micro-USB
- Output rate
- 500 Hz
- Dimensions
- 35.3 x 25.7 x 4.6 mm
- Heading accuracy
- less than 5 deg in 6-axis mode; less than 2 deg after calibrated 9-axis mode