AN14R1 / R3 / R5 工業姿態感測器
AN14 系列面向無人駕駛、AGV、巡檢機器人、智慧農機與工程機械等戶外工業場景,能輸出姿態角、四元數與原始感測資料,降低高動態環境下的航向漂移。
適用 AGV、巡檢機器人、智慧農機與工程機械;IP68 工業封裝、9 軸姿態解算、四元數與原始感測輸出,面向高動態戶外導航與姿態補償。
AN14 系列面向無人駕駛、AGV、巡檢機器人、智慧農機與工程機械等戶外工業場景,能輸出姿態角、四元數與原始感測資料,降低高動態環境下的航向漂移。
產品整合自研卡爾曼融合與多重陀螺儀陣列校正技術,將陀螺儀偏移誤差壓低到 1.76 度每小時等級,適合搭配 SLAM 與導航模組做高精度姿態補償。
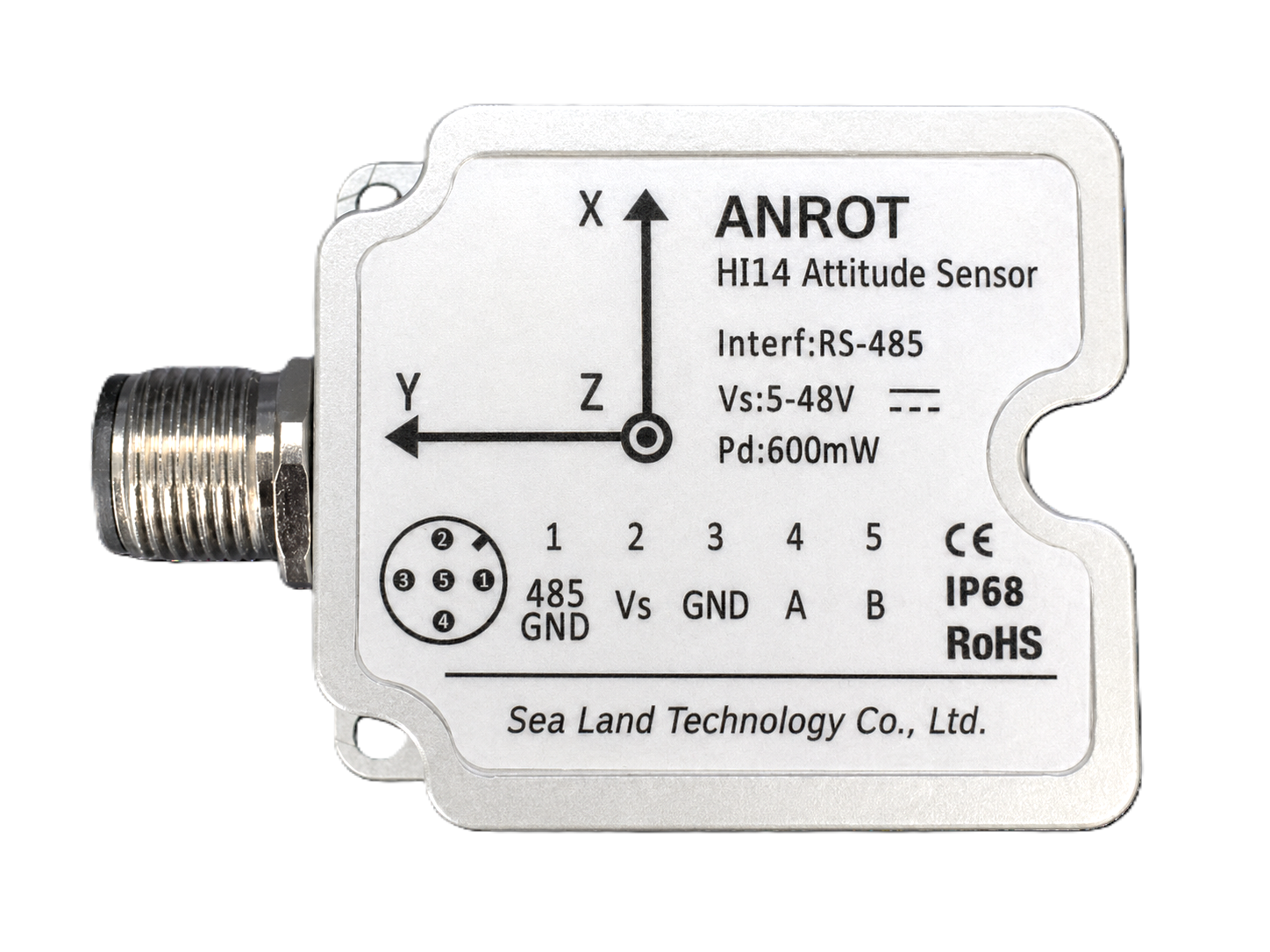
AN14 系列具備 IP68 外殼、部分型號的溫度補償,以及 EMC 抗擾設計,可長時間應用於泥濘、雨水、海用與飛行場景。
| 感測器組合 |
|
|---|---|
| 溫度範圍 | -40C 至 85C |
| 尺寸 | 58.5 x 40 x 20 mm |
| 工作電壓 | 5V 至 50V |
| 功耗 | 350 mW @ 24V |
| 輸出頻率 | 500 Hz |
| 輸出資料 |
|
| 輸出介面 |
|
| 量測範圍 |
|
| Roll / Pitch 精度 | 靜態 0.1 deg / 動態 0.1 deg |
| 陀螺零偏 | < 1.76 deg/h |
| 航向精度 | 6 軸模式或 9 軸校正模式 < 2 deg |
教學 / FAQ / 技術參考 / 手冊與軟體檔案